Vectores en 2D: Polar, Rectangular y Unitarios | Geometría y Trigonometría
Understanding Vectors in Electromechanical Energy Conversion
Introduction to Vectors
- The video begins with a greeting and introduces the topic of vectors, which was discussed in the first week of the course on electromechanical energy conversion.
- The focus is on understanding two-dimensional (2D) vectors, setting the stage for further exploration in subsequent videos.
Definition and Representation of Vectors
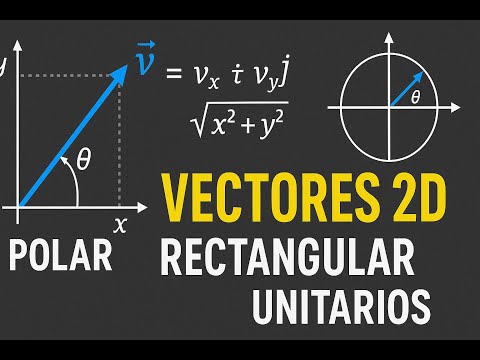
- A vector is defined as a point in a coordinate system, specifically within the Cartesian plane. It is represented by a letter (e.g., B) with an arrow indicating direction and consists of two components: X and Y.
- The vector's magnitude, denoted as R, represents its length or size and can be calculated using Pythagorean theorem.
Properties of Vectors
- Each vector has three angles:
- A right angle (90º),
- A polar angle (θ),
- An azimuthal angle (φ).
Calculating Vector Magnitude
- The magnitude of a vector is calculated using the formula R = sqrtx^2 + y^2 , where x and y are the horizontal and vertical components respectively.
Trigonometric Relationships
- To find angles related to vectors:
- Sine of θ relates to opposite side over hypotenuse: sin(θ) = I/R .
- Cosine relates adjacent side over hypotenuse: cos(θ) = X/R .
- Tangent relates opposite side over adjacent side: tan(θ) = I/X .
Example Calculation
- An example illustrates calculating a vector with components X = 4 and I = 5. Using Pythagorean theorem gives R ≈ 6.403 .
Practical Implications of Vector Magnitude
- The significance of vector magnitude is explained through practical scenarios, such as determining distance traveled diagonally versus along axes.
Further Trigonometric Calculations
- Additional calculations for sine, cosine, and tangent values are provided based on previous examples:
- Sine value approximates to about 0.78,
- Cosine value approximates to about 0.625,
- Tangent value equals approximately 1.25.
Finding Angles Using Inverse Functions
- To determine angles from sine values, inverse functions are used:
- Ensure calculator settings are correct for degrees,
- Calculate angle θ using θ = sin^-1left(I/Rright).
Understanding Polar and Rectangular Coordinates
Calculating Angles Using Trigonometric Functions
- The polar angle is derived from the cosine function, specifically using the inverse cosine (arccos), which relates to x over r. Here, R is √41 and X is 4.
- The calculation of cos(θ) results in 4/√41, confirming that the angle remains consistent across trigonometric functions; variations may occur only due to decimal approximations.
- The tangent function (arctan) yields an angle of approximately 51.34 degrees when calculating with I over X (5 over 4).
- It's crucial to remember that in any triangle, the sum of angles equals 180 degrees; thus, knowing one angle allows for calculations of others.
- The relationship between polar and azimuthal angles indicates that their sum must equal 90 degrees; for example, if the polar angle is 51.34°, then the azimuthal angle would be 38.66°.
Vector Representation
- After determining angles, vectors can be expressed in rectangular form as a quadrilateral shape or in polar form by stating its magnitude and direction.
- In rectangular coordinates, a vector can be represented as having components along both axes; for instance, it could be expressed as (4i + 5j).
- The polar representation involves stating the vector's magnitude (√41) alongside its angle (51.34°), providing a concise description of its direction and length.
Understanding Unit Vectors
- A unit vector represents movement along coordinate axes where each step counts as one unit; this concept helps visualize vector directions clearly.
- For example, moving four steps along the X-axis corresponds to a component of 4i while five steps along the Y-axis corresponds to a component of 5j.