Control de Temperatura Usando PID: Controlador Proporcional-Integral.
Controlador Proporcional Integral
In this section, the speaker introduces the topic of proportional integral controllers and feedback control for a prototype displayed on screen. Links to previous videos demonstrating construction and transfer function derivation are provided.
Controlador Proporcional Integral
- The proportional integral controller now includes two parameters: proportional constant and an additional parameter called "tiempo integrar."
- The closed-loop transfer function in feedback control with a proportional integral controller involves the process function divided by one plus the process function times the controller.
- Algebraic manipulation is required when integrating a proportional controller into the system, leading to insights on system behavior.
- When combining a first-order plant with a proportional integral controller, the closed-loop system becomes second order.
Integral Error Calculation
This part delves into calculating the integral error within the context of implementing a proportional integral controller in code.
Integral Error Calculation
- The formula for calculating integral error involves multiplying error by time intervals and summing up these values over time.
- Detailed explanation of how error is calculated and accumulated over time using algebraic expressions.
- Integrating error involves finding the area under the curve, which is crucial for determining controller output values.
System Behavior Analysis
Analyzing system behavior concerning second-order response characteristics based on specific constants related to stability and performance.
System Behavior Analysis
- Discussion on how system response mirrors second-order behavior depending on certain constants like gain and integral time constant.
Detailed Analysis of Control System Behavior
In this section, the speaker delves into the behavior of a control system, discussing key concepts such as system stability and response to setpoint changes.
Understanding System Behavior
- The speaker emphasizes the importance of making changes to the plant to achieve desired results.
- The speaker mentions leaving links for replicating results and highlights the significance of understanding each point's value.
- Exploring system dynamics, the speaker discusses achieving a first-order system by setting certain values equal.
- By setting specific values equal, the system should behave like a first-order system according to theory.
Simulation and Setpoint Changes
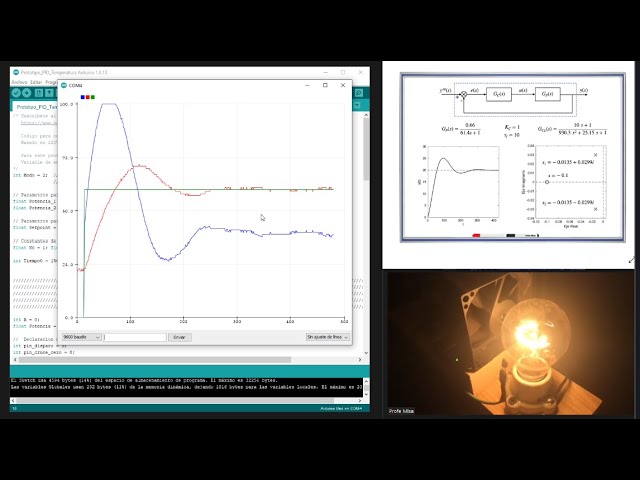
- A simulation with a step change from 0 to 20 showcases improved control behavior with proportional-integral control.
- Proportional-integral control eliminates offset seen with proportional control only, predicting reaching setpoint in around 500 seconds.
- Analyzing transfer functions and poles, canceling out poles and zeros leads to expected first-order behavior.
- Setting constants appropriately results in a first-order response as per theoretical expectations.
Experimental Setup and Observations
- Transitioning from manual mode to automatic mode for temperature adjustments demonstrates practical application.
- Implementing step changes in temperature while observing system responses provides insights into controller performance.
- Through simulations and adjustments in parameters like time constants, the speaker illustrates varying system behaviors.
- Observations on temperature rise and power consumption showcase how different parameters impact system response times.
Evaluation of System Response
- The speaker fast-forwards through time to demonstrate reaching setpoints within expected durations despite minor discrepancies due to changing conditions.
- Despite slight variations from simulations, the overall behavior aligns with theoretical predictions for a first-order system.
- Visual analysis reveals stable temperature maintenance post-setpoint attainment with minimal oscillations due to imaginary poles.
- The controlled response showcases effective regulation without significant deviations once steady state is achieved.
Exploring Effects of Parameter Changes on System Dynamics
This segment focuses on altering parameters within the control system setup to observe their impact on stability and oscillatory behavior.
Impact of Parameter Adjustments
- Modifying integral time constants influences oscillatory tendencies within the controlled system response.
- Decreasing time constants introduces complex conjugate poles leading to slight oscillations but eventual stabilization at setpoints.
- Conducting step changes in setpoints while adjusting parameters allows for real-time observation of dynamic responses.
- Altering time constants prompts oscillatory behaviors as predicted by theoretical considerations involving imaginary components.
Experimental Validation Through Simulations
- Initiating simulations post-parameter modifications confirms theoretical predictions regarding transient responses under varied settings.
- Real-time adjustments during simulations validate anticipated behaviors based on altered parameter configurations within the control loop.
- Monitoring temperature trends post-adjustments reveals overshoot tendencies attributed to imaginary pole contributions influencing transient responses.
Aquí ya nos dimos cuenta...
In this section, the speaker discusses the impact of adjusting the time constant on system behavior, focusing on response times and oscillations.
Adjusting Time Constant
- When the time constant matches that of the integral constant and process constant, the system behaves like a first-order system.
- Decreasing the time constant results in faster responses but may lead to increased oscillations.
- Smaller imaginary poles indicate more oscillations in the system's behavior.
Experiment Setup and Observations
The speaker sets up an experiment involving a fan to cool down a light bulb, observing temperature changes and system responses.
Experiment Execution
- Initiating fan operation to cool down the light bulb for further experimentation.
- Gradually lowering temperature from 30 degrees to 20 degrees for stability.
- Switching to automatic mode with a different set point to observe system behavior.
Control System Behavior Analysis
Analyzing control system behavior under changing set points and potential saturation issues.
System Response Analysis
- Observing oscillatory behavior due to set point changes.
- Exploring variable saturation limits and control strategies to prevent saturation.
- Noting differences in overshoot between systems with varying parameters.
System Dynamics and Control Strategies
Discussing how control parameters influence system dynamics and behaviors such as overshoot and stability.
System Dynamics Discussion
- Monitoring manipulable variables like power levels affecting temperature changes.
- Linking complex pole locations to oscillatory behaviors in closed-loop systems.
Controller Performance Evaluation
Reflecting on controller performance based on theoretical expectations versus real-world observations during experiments.
Controller Assessment
- Expressing satisfaction with controller performance alignment with theory in achieving desired outcomes.
- Emphasizing practical application of theory in real-time experiments without manipulation for exciting results.
Influence of Set Point on System Behavior
Exploring how set points impact response speed, oscillations, and overall control system behavior.
Set Point Influence
- Highlighting how adjusting set points affects response speed, oscillations, and overall system behavior.
Emotional Experimentation with Control Systems
In this section, the speaker discusses conducting an experiment to experience control system dynamics firsthand.
Conducting a Perturbation Experiment
- The speaker induces a disturbance by briefly cooling down the fan, observing how the controller reacts.
- The controller exhibits disturbance rejection by increasing power to return to the set point after a disturbance.
- Different applications may require controllers with varying responses - fast and oscillatory or slow and stable.
Impact of Controller Parameters on System Stability
This part delves into how controller parameters influence system stability and behavior.
Influence of Controller Gain
- Choosing an inappropriate gain value can lead to system instability, demonstrated through simulation.
- A negative multiplication result from improper gain selection can render the system unstable.
Effects of Tuning Constants on System Behavior
Exploring how tuning constants affect system response and stability.
Tuning Constant Impact
- Setting tuning constants appropriately ensures stable system behavior as seen in simulations.
- Adjusting tuning constants too high can induce excessive oscillations and potential instability.
Observing System Response Under Varying Conditions
Observing how different parameter settings impact system response under perturbations.
System Response Analysis
- Comparing gradual versus abrupt changes in control input highlights varying levels of system oscillation.
New Section
In this section, the speaker discusses the responsiveness of a controller built quickly and highlights the expected behavior of P and K controllers. Additionally, viewers are encouraged to leave comments for any queries or assistance related to installation.
Controller Responsiveness
- The controller was built rapidly but responds abruptly.
- This behavior is typical for P and K controllers.
Viewer Interaction
- Viewers are invited to share comments or questions regarding installation.