Understanding Work Envelopes of Robots!
Understanding the Work Envelope in Robotics
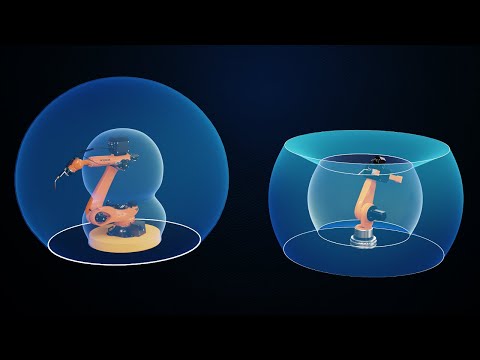
Introduction to Work Envelope
- The work envelope of a robot is defined as the volume that its end effector can reach, illustrated by a shaded area in diagrams.
- Different robots have varying work envelopes based on their design and intended tasks.
Characteristics Influencing Work Envelope
- A robot's work envelope is determined by three key physical characteristics:
- Range of Joints: Both linear and angular ranges are crucial for movement.
- Size of Body Parts: The dimensions of the robot's body, arm, and wrist affect its reach.
- Type of Joints: Variations in joint types lead to different configurations and capabilities.
Robot Design Challenge Example
- In a scenario where boxes need to be collected from a conveyor belt, the required work envelope is rectangular. A robot with linear motions in all three directions (x, y, z) would be ideal for this task.
- This type of robot is referred to as a Cartesian robot due to its three linear joints allowing comprehensive movement within the designated volume.
Safety Considerations with End Effectors
- When using an end effector like a metal cutter, safety becomes paramount; operators must remain outside the defined work envelope to avoid danger. Thus, movement restrictions may be necessary using electromechanical limit switches to create an operating envelope within the larger work envelope.
Modifying Robot Configurations for Different Tasks
- For transferring boxes between conveyor belts requiring cylindrical motion:
- Replace one linear joint with a rotary joint to allow 360-degree rotation around its central axis.
- This configuration creates a cylindrical work envelope but introduces dead zones due to physical limitations of the robot's body parts.
Enhancing Versatility through Design Changes
- To adapt cylindrical robots for complex tasks like welding:
- Additional modifications involve replacing another linear joint with a rotary joint.
- This results in a partially spherical work envelope capable of performing intricate movements needed for welding operations while still having some dead zones present within it.
Analyzing Spherical Work Envelopes
- By freezing z-axis rotation and analyzing remaining rotary arms:
- The largest circle traced by fully extended arms has an angular limit of 280 degrees.
- The smallest circle occurs when arms are folded but can be extended further by adjusting arm positions creatively.