Robo DK , Documentacion Guia Basica, Primeros Pasos, Empezar Programa 1 Fuera de Linea Paso-Paso 100
Introducción al software de simulación de robots
Resumen de la sección: Este video es una introducción al software de simulación de robots. Se muestra cómo descargar el programa y se explican los primeros pasos para utilizarlo.
Descarga del software
- Para descargar el software, se debe acceder a la pestaña correspondiente según el sistema operativo (Android, Windows, etc.).
- Es importante verificar los requisitos del sistema antes de descargar el programa.
- También se encuentra disponible una guía básica con consejos y pasos iniciales.
Funcionalidades principales
- El programa cuenta con diferentes iconos que representan funciones como añadir referencias y objetivos.
- Se pueden realizar simulaciones de colisión, movimientos axiales y circulares, entre otros.
- Las coordenadas (x, y, z) son fundamentales en la programación del robot.
Herramientas adicionales
- Además de las coordenadas cartesianas, también se pueden utilizar grados de euler para establecer posiciones.
- Existe un detector de colisiones que permite simular obstáculos en las simulaciones.
- Se pueden personalizar los colores de las coordenadas para mayor claridad visual.
Interfaz del programa
- La interfaz principal incluye un menú con opciones como archivo, editar y programar.
- Desde el menú principal se pueden acceder a diversas herramientas y configuraciones.
- Es recomendable familiarizarse con todas las funciones disponibles para aprovechar al máximo el programa.
Programación y herramientas adicionales
Resumen de la sección: En esta parte del video se exploran las opciones avanzadas del programa, como la programación de movimientos y la verificación de colisiones.
Programación de movimientos
- Desde el menú principal se pueden añadir sistemas de referencia y modificar objetivos.
- Se pueden establecer instrucciones para realizar movimientos articulares, lineales y circulares.
- Es importante aprender todas las funciones disponibles para ejecutar programas con precisión.
Herramientas adicionales
- El programa ofrece diferentes vistas, como rotación, traslación y pantalla completa.
- La opción de verificar colisiones es útil para simular situaciones con obstáculos.
- Se pueden cambiar los colores de las coordenadas para una mejor visualización.
Manipulación del robot en el programa
Resumen de la sección: En esta parte del video se muestra cómo manipular el robot dentro del programa, utilizando diferentes herramientas y opciones.
Manipulación del robot
- Se puede ajustar el tamaño y ubicación del robot en la vista isométrica.
- Mediante la rotación y traslación se pueden mover las partes del robot según sea necesario.
- Es importante tener conocimientos básicos sobre rotaciones en los ejes x, y, z.
Uso de bibliotecas y carga de archivos
Resumen de la sección: En esta parte del video se explica cómo utilizar bibliotecas y cargar archivos en el programa para acceder a modelos predefinidos.
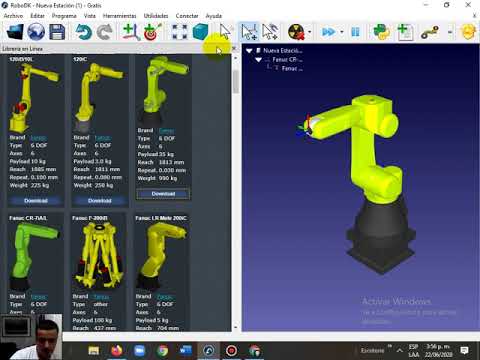
Bibliotecas y modelos predefinidos
- El programa cuenta con una amplia librería que incluye ejemplos de robots, cajas, láseres, entre otros elementos.
- Se puede buscar modelos por etiqueta o tipo según las necesidades específicas.
- Es importante tener en cuenta características como capacidad de carga, alcance y repetibilidad al seleccionar un modelo.
Exploración de opciones avanzadas
Resumen de la sección: En esta parte del video se exploran opciones avanzadas del programa, como la configuración de etiquetas y terrenos.
Opciones avanzadas
- Se pueden explorar diferentes etiquetas para encontrar modelos específicos, como robots ABB.
- También se pueden modificar los terrenos para adaptar las simulaciones a diferentes escenarios.
Selección de robot y tipos de herramientas
Resumen de la sección: En esta sección, se explica cómo seleccionar un robot y los diferentes tipos de herramientas disponibles.
Selección del robot
- Se puede elegir el tipo de robot según el grado de libertad, como 56 grados o 7 grados.
- También se puede seleccionar el tipo de robot según su capacidad para agarrar objetos o utilizar herramientas específicas.
- Hay opciones para seleccionar robots por medio de bandas transportadoras, mesas, cilindros, esferas y cubos.
Tipos de herramientas
- Las herramientas pueden ser agregadas al robot según las necesidades.
- Existen diferentes referencias y marcas disponibles para elegir.
- Se pueden seleccionar herramientas basadas en el alcance y el peso que deben soportar.
Movimientos del robot y coordenadas
Resumen de la sección: En esta sección, se explican los movimientos del robot y las coordenadas utilizadas.
Movimientos del robot
- El robot tiene seis grados de libertad que permiten realizar movimientos en diferentes direcciones.
- Los movimientos pueden ser lineales (en x), rotacionales (en zeta) o una combinación de ambos.
Coordenadas
- Las referencias montar indican los colores rojo, verde y azul para representar las coordenadas x, y, z respectivamente.
- Estos colores ayudan a visualizar la posición del robot en el espacio tridimensional.
- También es posible mostrar el espacio de trabajo del robot para verificar si alcanza determinado objeto o área.
Ángulos de Euler y herramientas
Resumen de la sección: En esta sección, se explican los ángulos de Euler y cómo seleccionar herramientas.
Ángulos de Euler
- Los ángulos de Euler son seis en total y representan diferentes partes del robot.
- El primer ángulo es la base, seguido por el codo y el brazo que ensambla con la herramienta.
Selección de herramientas
- Se puede seleccionar una herramienta específica para el robot.
- La herramienta se puede configurar para realizar movimientos en diferentes direcciones.
Programación del robot
Resumen de la sección: En esta sección, se explica cómo programar el robot utilizando frames y break points.
Frames y break points
- Un frame es una coordenada donde se coloca una pieza o un objetivo al que el robot debe llegar.
- Los break points indican las posiciones a lo largo del programa donde el robot debe detenerse o realizar alguna acción específica.
Verificación del campo de trabajo
Resumen de la sección: En esta sección, se explica cómo verificar si un frame está dentro del campo de trabajo del robot.
Verificación del campo de trabajo
- Es posible verificar si un frame está dentro del campo de trabajo utilizando una herramienta específica.
- Con un simple clic derecho, es posible confirmar si no hay problemas con el campo de trabajo.
Estos son los puntos clave destacados en este video.
Configuración inicial
Resumen de la sección: En esta sección, se realiza la configuración inicial del programa. Se ajusta el desplazamiento y se selecciona el tipo de agarre.
Ajuste del desplazamiento
- Se agrega un frame adicional para el desplazamiento.
- El desplazamiento debe ser negativo para que el robot pueda alcanzar la posición deseada.
- Se verifica que el espacio de trabajo esté dentro de los límites adecuados.
Selección del tipo de agarre
- Se agrega una herramienta al robot, en este caso una pinza.
- Se selecciona un objeto a agarrar, en este caso un cubo.
- Se ubica el cubo en la posición de agarre.
Definición de posiciones iniciales
Resumen de la sección: En esta sección, se definen las posiciones iniciales del robot y se establecen los objetivos antes de iniciar el programa.
Definición de posición inicial
- Se define una posición inicial donde el robot tendrá una herramienta lateral girada 90 grados.
- Esta posición será utilizada como punto de partida para las operaciones posteriores.
Corrección de errores
Resumen de la sección: En esta sección, se corrigen errores relacionados con el agarre y la estación objetivo.
Corrección del agarre
- Se corrige un error en la programación relacionado con el agarre.
- Se verifica que el objeto sea alcanzado correctamente por la herramienta.
Verificación de la zona de trabajo
Resumen de la sección: En esta sección, se verifica que las posiciones estén dentro de la zona de trabajo y se realiza ajustes si es necesario.
Verificación de posición de dejar
- Se verifica que la posición de dejar esté dentro de la zona de trabajo.
- Se realiza un ajuste para ubicar correctamente la posición.
Agregar herramienta y definir posición final
Resumen de la sección: En esta sección, se agrega una herramienta al robot y se define la posición final donde el objeto será dejado.
Agregar herramienta
- Se agrega una herramienta al robot.
- Se carga el objeto en la herramienta.
Definir posición final
- Se establece una posición final donde el objeto será dejado.
- Esta será la posición a alcanzar por el robot durante las operaciones.
Ejecución del programa
Resumen de la sección: En esta sección, se ejecuta el programa para realizar las operaciones planificadas.
Ejecución del agarre
- El robot agarra el objeto según lo programado.
- Se establece una nueva posición para dejar el objeto después del agarre.
Programa de movimiento de objetos
Resumen de la sección: En esta sección, se explica cómo crear un programa para el movimiento de objetos.
Creación de la posición inicial
- Seleccionar "General Programa" y generar una posición inicial.
- Vincular el objeto a la posición inicial.
Configuración del desplazamiento
- Indicar el tipo de desplazamiento (recto o circular).
- Establecer que el objeto vaya a la posición deseada.
Agarrar y soltar el objeto
- Generar un comando para agarrar el objeto.
- Después del agarre, realizar otro desplazamiento hacia la posición de dejar.
- Soltar el objeto en la posición indicada.
Regresar a la posición inicial
- Volver al punto de partida después de soltar el objeto.
- Configurar que regrese a su posición inicial.
Ajustes adicionales
- Ocultar las trayectorias del movimiento.
- Ajustar la velocidad del movimiento según sea necesario.
Ejecución del programa
Resumen de la sección: En esta sección, se muestra cómo ejecutar el programa creado anteriormente y ajustar la velocidad del movimiento.
Ejecución del programa
- Iniciar la ejecución del programa.
- Observar cómo el objeto realiza los movimientos programados.
Ajuste de velocidad
- Modificar la velocidad del movimiento según sea necesario.
- Verificar los cambios realizados en tiempo real.
Conclusiones finales
Resumen de la sección: En esta última parte, se concluye con una guía básica sobre la creación y ejecución de programas de movimiento de objetos.
Personalización del programa
- Se puede personalizar el programa según las preferencias individuales.
- Ajustar la posición final del objeto para obtener diferentes resultados.
Finalización del video
- Se agradece por ver el video y se invita a dar "like" si fue útil.
¡Espero que esta guía básica sobre la creación y ejecución de programas de movimiento de objetos haya sido útil!