2-vector representation of rotation in 3D
The orientation of a body in 3D can also be described by two vectors, often called the approach and orientation vectors.
2-vector representation of rotation in 3D
Understanding the Orientation of Industrial Robots
In this section, we will discuss the orientation of the end effector or gripper in industrial robots. We will explore the 2-axis representation convention and how it describes the orientation of the gripper.
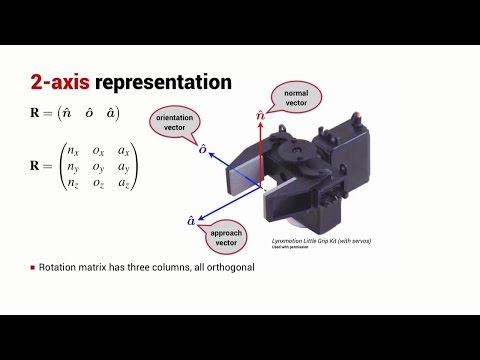
Gripper Orientation Representation
- The 2-axis representation convention is commonly used to describe the orientation of the gripper in industrial robots. It involves two vectors: the approach vector and the orientation vector.
- The approach vector is parallel to the fingers of the robot, while the orientation vector joins the tips of two fingers. These vectors provide information about the twist and direction of the robot fingers.
- For many robotic manipulation tasks, knowing only these two vectors (approach and orientation) is sufficient to describe the orientation of the gripper.
Creating a Right-Handed Coordinate Frame
- To create a right-handed coordinate frame, a third vector called the normal vector is introduced.
- The gripper's orientation can be expressed as an orthonormal rotation matrix by stacking up these three vectors (N, O, A) as columns.
- Each column represents one element of a 3x3 matrix, where all columns must be orthogonal.
- If we know both A and O vectors, we can compute N as their cross product.
Describing Position and Orientation for Robotic Manipulation
This section focuses on describing both position and orientation for robotic manipulation tasks. We will explore how to attach a coordinate frame to a robot's gripper and define its approach and orientation vectors.
Attaching Coordinate Frame to Gripper
- To describe both position and orientation for robotic manipulation tasks, we attach a coordinate frame to the gripper of a robot.
- The z-axis of this coordinate frame points outwards from the gripper and represents the approach vector.
- The y-axis of the gripper's coordinate frame represents the orientation vector.
Describing Gripper Orientation
- The gripper's orientation can be described by specifying the direction in which it approaches an object (approach vector) and its orientation relative to that direction (orientation vector).
- By defining these vectors, we can effectively describe the orientation of the gripper for different manipulation tasks.
Summary
In this transcript, we learned about the orientation of industrial robots' end effectors or grippers. We discussed the 2-axis representation convention, which involves using the approach and orientation vectors to describe the gripper's orientation. Additionally, we explored how to create a right-handed coordinate frame and attach it to the gripper for describing both position and orientation in robotic manipulation tasks.